PL
PL
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

wizja maszynowa
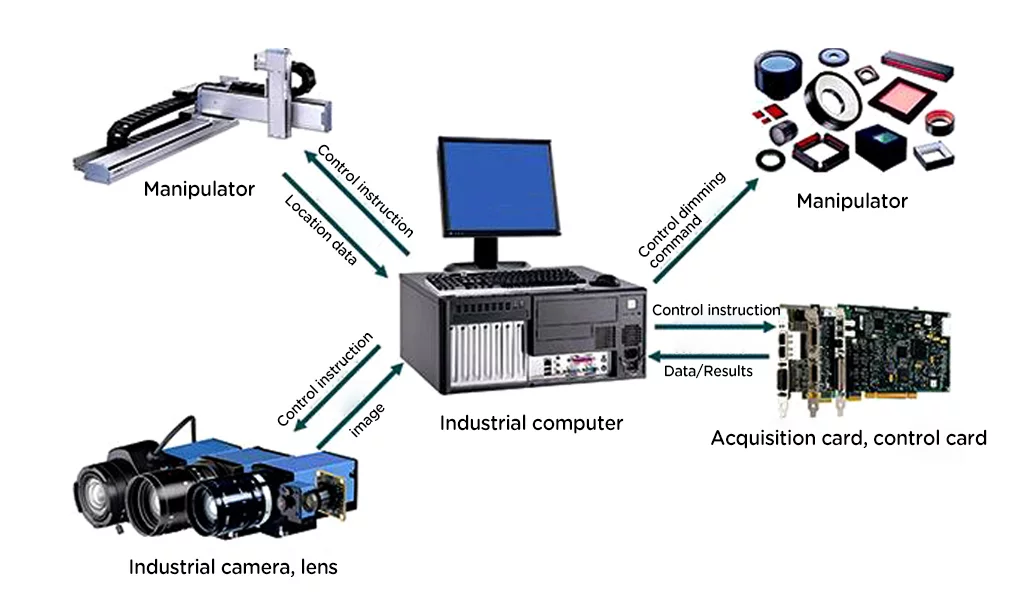
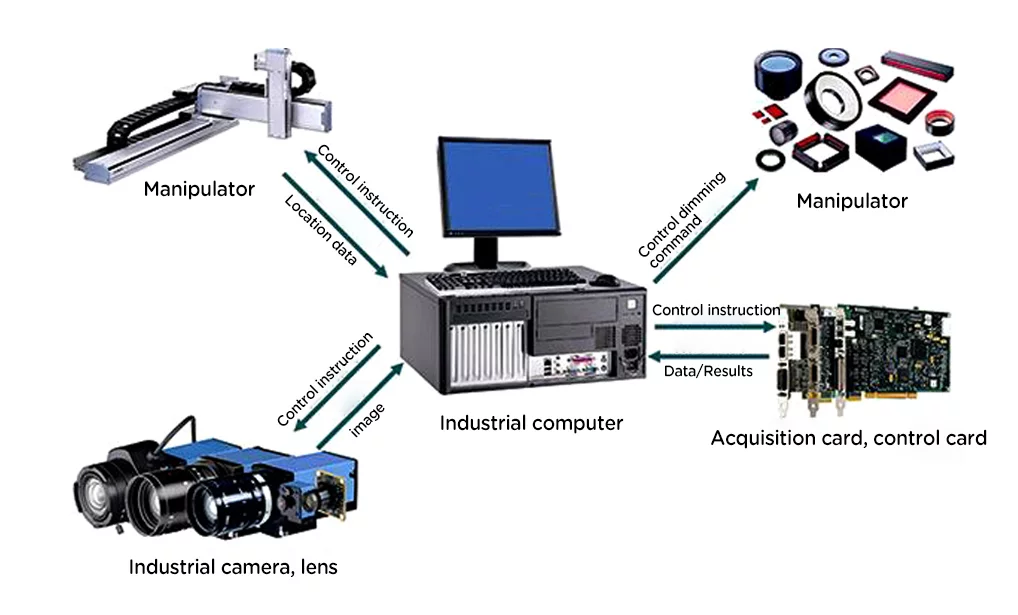
wizja maszynowa to kompleksowa technologia obejmująca przetwarzanie obrazu, technologię inżynierii mechanicznej, sterowanie, oświetlenie źródła światła elektrycznego, obrazowanie optyczne, czujniki, technologię wideo analogową i cyfrową, oprogramowanie komputerowe i technologi
Zasada działania
system kontroli wizualnej wykorzystuje kamerę ccd do przekształcania wykrytego celu w sygnał obrazu, który jest wysyłany do dedykowanego systemu przetwarzania obrazu i przekształcany w sygnał cyfrowy zgodnie z rozkładem pikseli, jasnością, kolorem i in
Obszar zastosowania
zastosowanie wizji maszynowej obejmuje głównie dwa aspekty: wykrywanie i wizję robotową:
1. wykrywanie: można go podzielić na wykrywanie ilościowe o wysokiej precyzji (takie jak klasyfikacja komórek mikrografów, pomiar rozmiaru i położenia części mechanicznych) i wykrywanie jakościowe lub półilościowe bez przyrządów pomiarowych (takie jak kontrola wyglą
2. widzenie robotowe: jest używane do kierowania działaniem i działaniem robota w dużym zakresie, np. do wybierania części roboczych z bałaganów przesyłanych przez hopper i umieszczania ich na taśmie przenośnej lub innym urządzeniu w określonym kierunku (tj.