PT
PT
 EN
EN AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SL
SL
 UK
UK
 VI
VI
 HU
HU
 MT
MT
 TH
TH
 TR
TR
 AF
AF
 MS
MS
 GA
GA
 BN
BN

Visão Artificial
A visão artificial é uma tecnologia abrangente, incluindo processamento de imagem, tecnologia de engenharia mecânica, controle, iluminação de fonte de luz elétrica, imagem óptica, sensores, tecnologia de vídeo analógica e digital, software e tecnologia de hardware (algoritmos de melhoria e análise de imagem, cartões de imagem
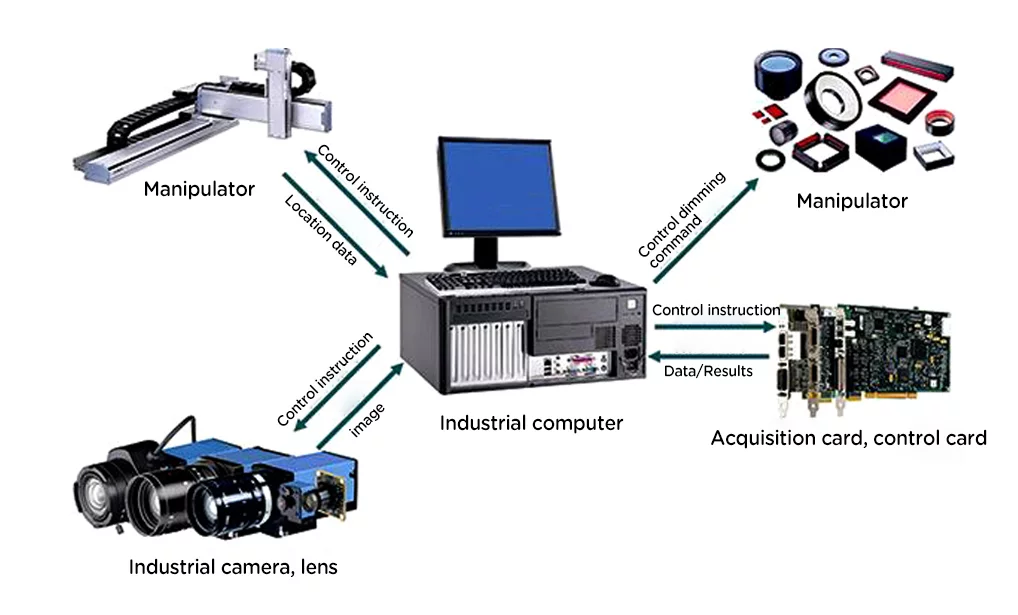
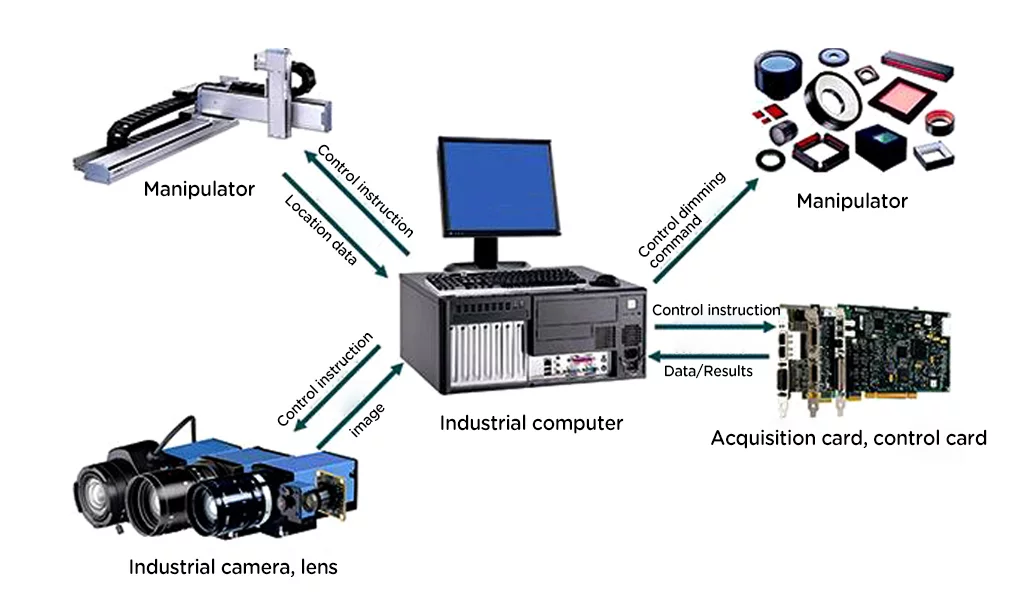
Princípio de funcionamento
O sistema de inspeção de visão artificial utiliza uma câmara ccd para converter o alvo detectado num sinal de imagem, que é enviado para um sistema de processamento de imagem dedicado e convertido num sinal digital de acordo com a distribuição de pixels, brilho, cor e outras informações, e o sistema de processamento de imagem realiza vários
Área de aplicação
A aplicação da visão artificial inclui principalmente dois aspectos: detecção e visão robótica:
1. detecção: pode ser dividida em detecção quantitativa de alta precisão (como a classificação de células de micrógrafos, a medição do tamanho e da posição de peças mecânicas) e detecção qualitativa ou semi-quantitativa sem instrumentos de medição (como a inspecção da aparência do produto, a identificação e o
2. visão robótica: é utilizada para orientar a operação e a acção do robô numa grande gama, como por exemplo, a recolha de peças de trabalho da pilha confusa de peças de trabalho enviadas pela tolha e a sua colocação na cinta transportadora ou noutro equipamento numa determinada orientação (ou seja, o problema da recol